Este proyecto es una demostración avanzada de la integración entre simulación robótica, programación de controladores y automatización aplicada a un entorno de ajedrez. A través de la creación de una estación de trabajo en RobotStudio y el desarrollo de una aplicación en C#, he logrado implementar un sistema donde dos brazos robóticos interactúan de manera inteligente, simulando un juego de ajedrez entre un usuario humano y una máquina.
Descripción del Proyecto
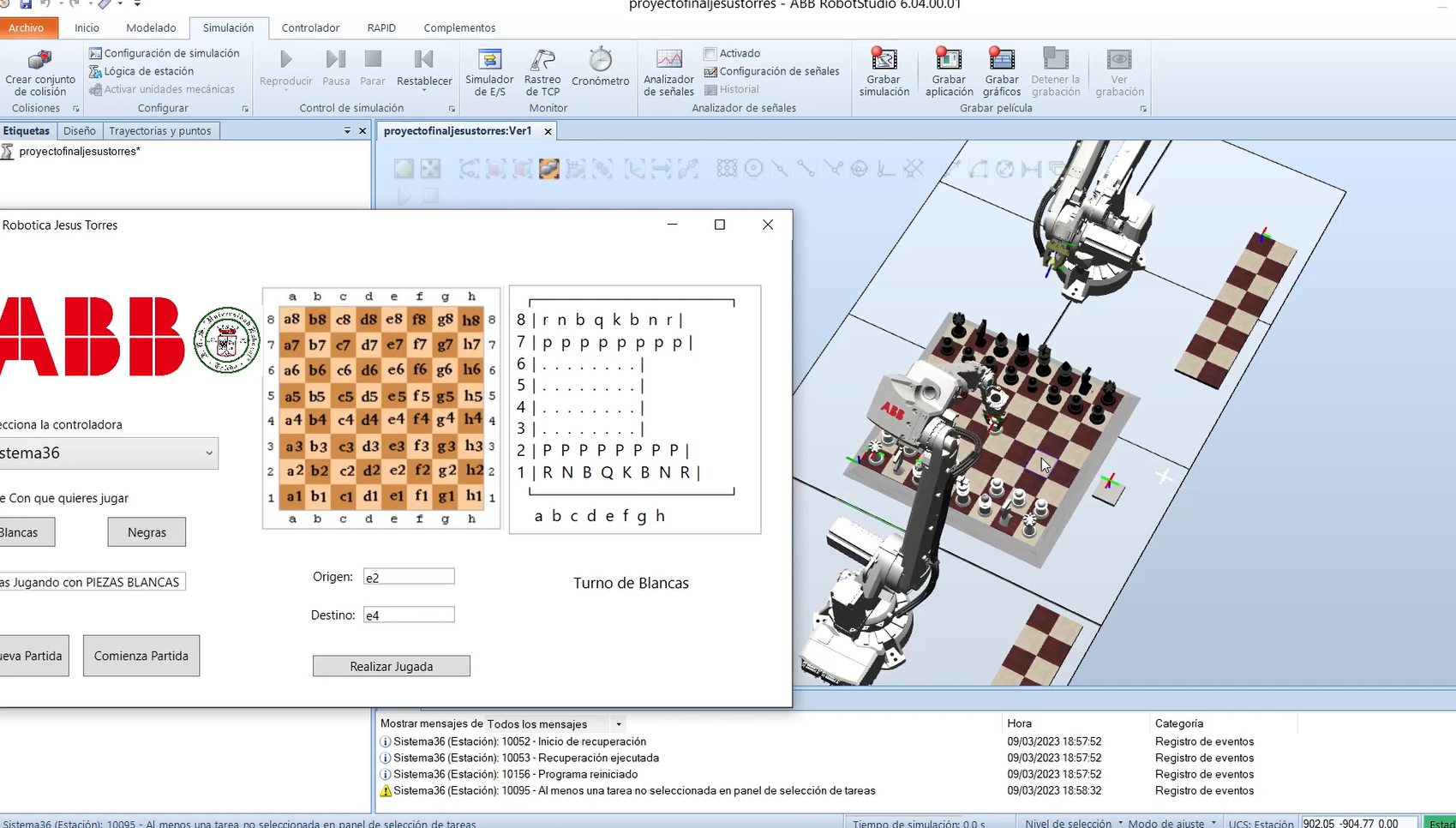
El núcleo del proyecto se basa en la interacción entre una controladora ABB y dos brazos robóticos que simulan un juego de ajedrez. Utilizando RobotStudio, desarrollé una estación de simulación que permite probar y ajustar la lógica de control de los robots antes de implementarla en el entorno físico. Esta simulación es crucial para garantizar la precisión y eficiencia de los movimientos, reduciendo errores y optimizando el rendimiento del sistema.
La inteligencia del sistema proviene de la integración con Stockfish, un motor de ajedrez de alto rendimiento. Mediante el desarrollo de una aplicación en C#, logré establecer una comunicación fluida entre Stockfish y la controladora del robot. La aplicación recibe los movimientos calculados por Stockfish en formato de comandos textuales y los traduce en coordenadas precisas que la controladora puede entender. Esto permite que uno de los brazos robóticos realice movimientos estratégicos en el tablero de ajedrez de forma autónoma.
El flujo de trabajo es el siguiente: el usuario introduce manualmente las coordenadas de su movimiento en el tablero, las cuales son enviadas a un brazo robótico. Una vez que el brazo ejecuta el movimiento, el sistema envía el estado actualizado del tablero a Stockfish a través de la aplicación en C#. Stockfish procesa la información, determina el mejor movimiento, y lo devuelve a la aplicación, que a su vez lo traduce en coordenadas para el segundo brazo robótico. Este ciclo continuo permite que el robot responda automáticamente al usuario, creando una experiencia de juego fluida y natural.
Aptitudes Desarrolladas
Este proyecto me permitió desarrollar y consolidar una amplia gama de habilidades técnicas y de ingeniería:
-
Simulación Robótica con RobotStudio: Dominio en la creación de estaciones de simulación para probar y validar la lógica de control en un entorno seguro y controlado antes de la implementación física.
-
Programación en C#: Desarrollo de aplicaciones robustas que facilitan la comunicación entre diferentes sistemas, demostrando un fuerte conocimiento en la creación de interfaces de software para hardware especializado.
-
Integración de Controladores Programables: Experiencia en la programación y control de controladores robóticos, específicamente con tecnología ABB, para ejecutar tareas complejas y precisas.
-
Automatización de Procesos: Diseño de un flujo automatizado para la ejecución de movimientos estratégicos en un juego de ajedrez, aplicando principios de automatización en un entorno lúdico.
-
Interacción Hombre-Máquina (HMI): Implementación de un sistema donde el usuario puede interactuar directamente con el robot, mejorando la accesibilidad y usabilidad de tecnologías avanzadas.
-
Gestión de Comunicación entre Sistemas: Desarrollo de una interfaz que permite la comunicación bidireccional entre un motor de ajedrez externo y un sistema robótico, asegurando que ambos trabajen en sincronía.
-
Optimización de Algoritmos: Aplicación de técnicas para traducir los cálculos de un motor de ajedrez en movimientos precisos y fluidos, optimizando tanto la respuesta del sistema como la experiencia del usuario.
-
Resolución de Problemas Complejos: Enfrentar y superar desafíos técnicos relacionados con la precisión de los movimientos robóticos y la correcta interpretación de los comandos recibidos desde el motor de ajedrez.
Impacto y Aplicaciones Futuras
Este proyecto no solo demuestra la capacidad de un brazo robótico para jugar al ajedrez, sino que también sirve como un modelo escalable para aplicaciones industriales y de entretenimiento que requieran una integración avanzada entre software y hardware. Las habilidades desarrolladas en este proyecto pueden ser aplicadas a otras áreas de la robótica, incluyendo la automatización industrial, la interacción humano-robot, y el desarrollo de sistemas autónomos complejos.