Descripción del Proyecto
Este proyecto colaborativo integra un robot sigue líneas con un brazo robótico para automatizar el proceso de manipulación y colocación de piezas en un entorno industrial. El sistema está diseñado para transportar piezas desde un punto A hasta un punto B, donde el brazo robótico se encarga de depositarlas en una ubicación específica. La coordinación entre el robot y el brazo robótico se realiza a través de una comunicación eficaz entre un HMI Siemens, un PLC Siemens, y una placa Arduino que controla el robot sigue líneas.
Componentes y Tecnologías
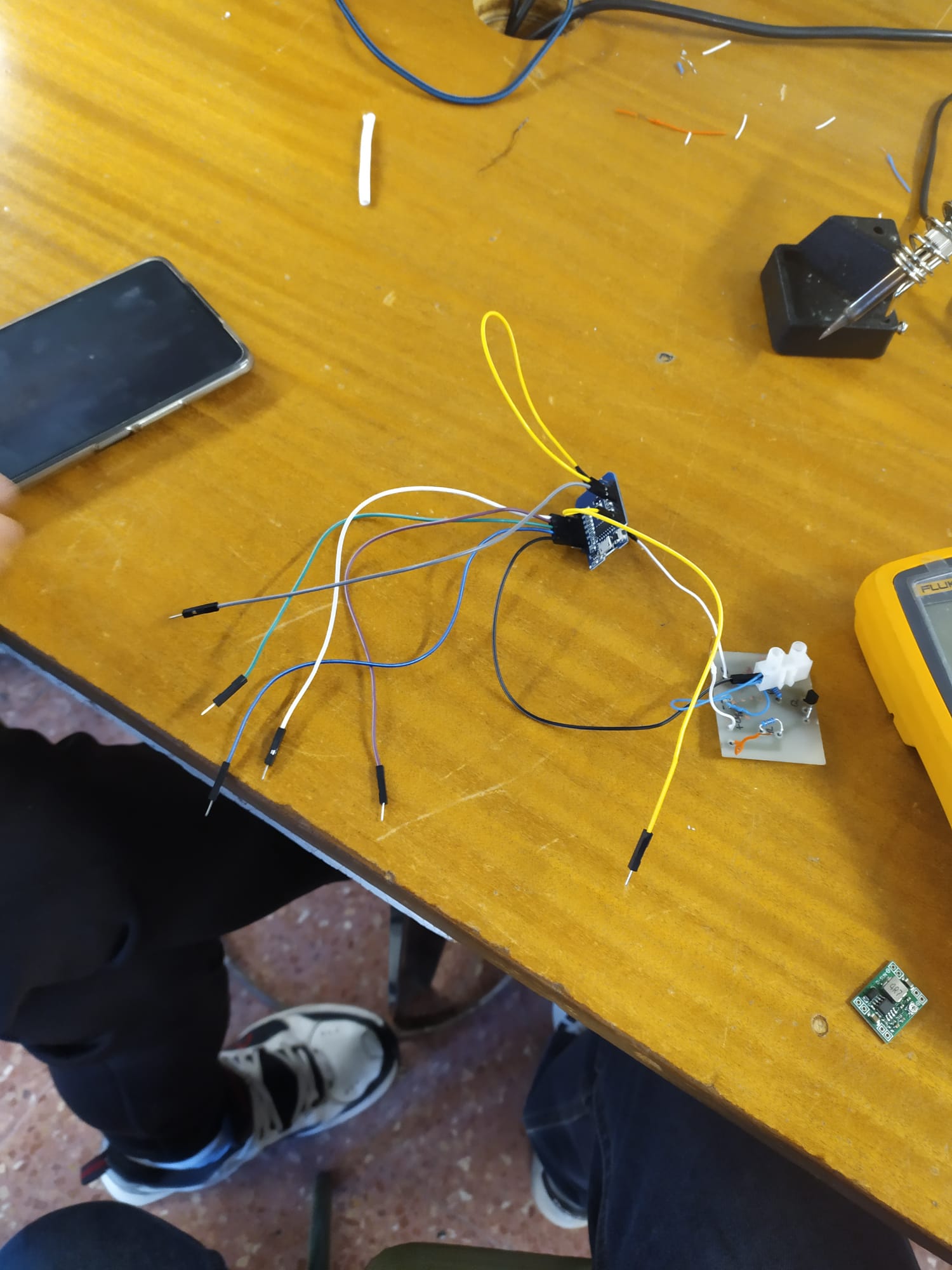
- Robot Sigue Líneas: Equipado con una placa Arduino y un adaptador con transistor para enviar señales al PLC, utilizando el protocolo de comunicación S7.
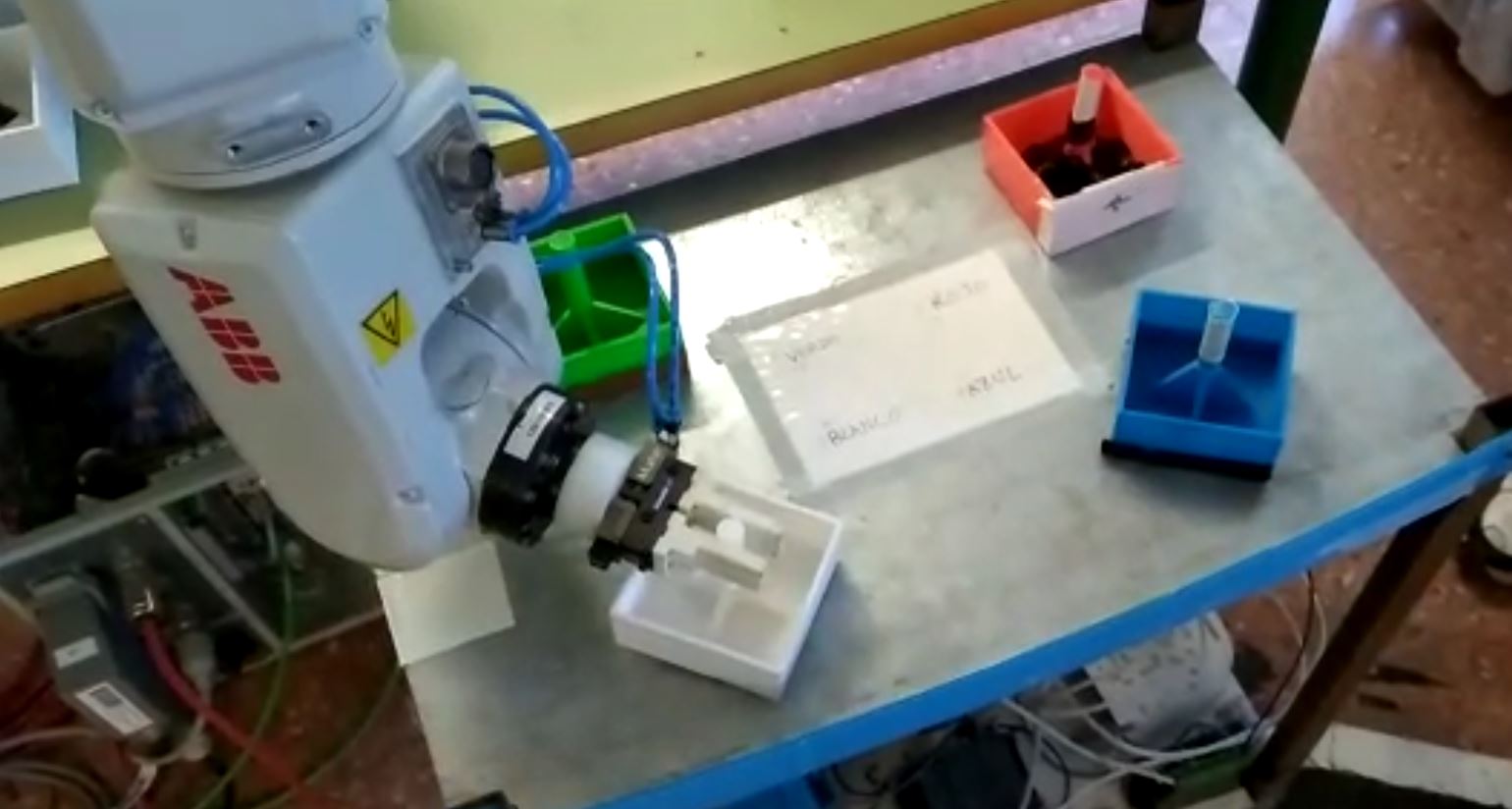
- Brazo Robótico: Controlado por un PLC Siemens que recibe y ejecuta órdenes de colocación de piezas.
- HMI de Siemens: Utilizado para la selección de piezas y el envío de órdenes al PLC.
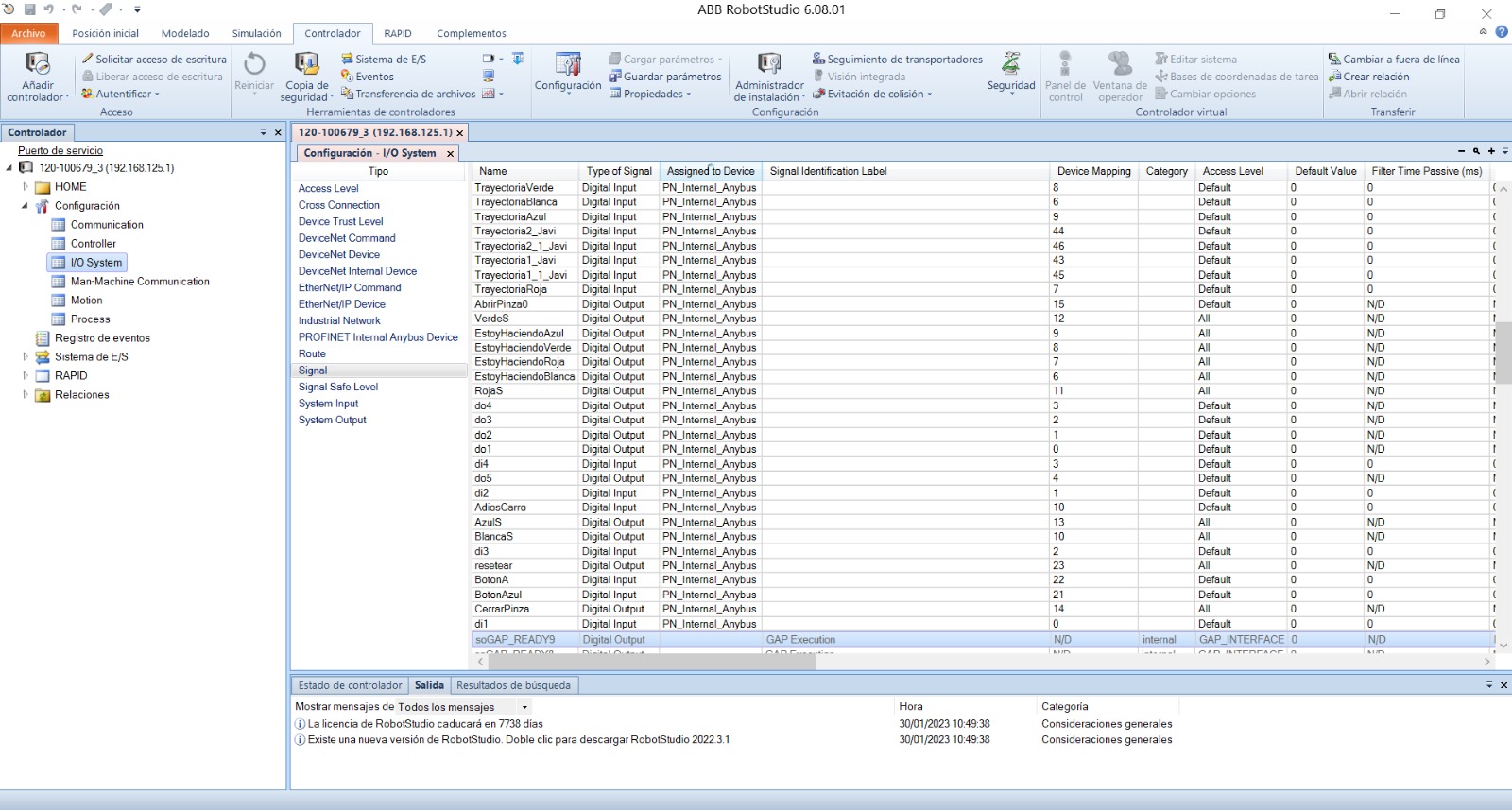
- PLC Siemens: Coordinador principal que gestiona la comunicación entre el HMI y el brazo robótico, ejecutando acciones basadas en señales del robot sigue líneas.
Proceso de Comunicación
- Selección de Piezas: El operador selecciona las piezas a depositar a través del HMI Siemens.
- Envío de Órdenes: El PLC recibe la orden del HMI y espera la señal del robot sigue líneas.
- Comunicación s7: Al llegar a la ubicación deseada, el robot sigue líneas envía una señal al PLC mediante s7.
- Acción del Brazo Robótico: El PLC procesa la señal y ordena al brazo robótico realizar la colocación de las piezas a traves de profinet.
Aptitudes Desarrolladas
- Integración de Sistemas: Experiencia en la integración de sistemas de control y comunicación entre un robot sigue líneas y un brazo robótico, utilizando tecnologías como Arduino y PLC Siemens.
- Programación de PLC: Competencia en la programación de PLC Siemens para coordinar acciones basadas en señales de entrada y comunicarse a través de Profinet.
- Comunicación Industrial: Conocimiento en el uso de protocolos industriales como Profinet y S7 para la interoperabilidad entre dispositivos.
- Diseño de Interfaces HMI: Habilidad en la configuración de HMI para gestionar y supervisar la selección y operación de piezas.
Impacto y Aplicaciones Futuras
Impacto: Este sistema automatizado mejora significativamente la eficiencia y precisión en la manipulación de piezas, reduciendo el tiempo de ciclo y minimizando errores humanos en el proceso de colocación. La integración de tecnologías modernas optimiza el flujo de trabajo y contribuye a una mayor consistencia en la producción.
Aplicaciones Futuras: Este enfoque puede adaptarse y escalarse para aplicaciones en diversas industrias, como la manufactura, la logística y el ensamblaje de componentes. Futuras implementaciones podrían incluir:
- Incorporación de Sensores Adicionales: Para mejorar la precisión en la manipulación de piezas.
- Técnicas Avanzadas de Aprendizaje Automático: Para adaptar el sistema a diferentes tipos de piezas.
- Expansión a Operaciones Más Complejas: Integración de múltiples robots y brazos robóticos trabajando en sincronía.